TUNSS
- Home / Products & Projects / Automotive /
- TUNSS
TUNSS
TUNSS is a sytem able to help the driver in situations where the visibility is low due to high density smokes, humidity (typical contitions in case of fires in gallery).
The system uses different sensor technologies to detect objects in worst conditions.
The system uses different sensor technologies to detect objects in worst conditions.
Features:
- New generation radar 77GHz based on Frequency Modulation Continuous Wave with 16 beams
- 180 degrees Laser Scan with 850nm wave length
- Thermo Camera to detect objects depending from their temperature
- Ultrasound sensors to detect lateral walls
- GPS system to provide position information.
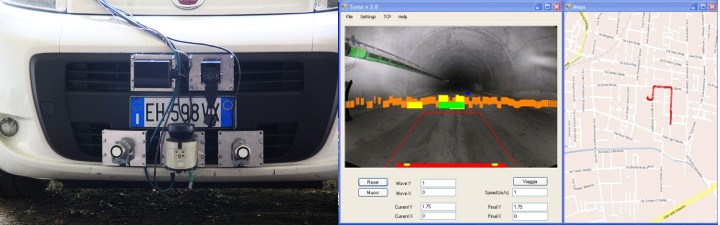
Graphical User Interface features:
- Data fusion of different information coming from different sensors
- All the data are placed considering the real position in a prospective view
- The scene is build on a sequence of pictures pre-acquired that are automatically managed by the solution during the movement
- Prospective view is the main information the driver needs
- GPS information provides the global positioning thru a map
- Thermo Camera window provides the real information from the camera
- Acoustic signals alerts on the presence of objects.